深圳郎特科技紅外感應(yīng) LED 燈管與雷達(dá) LED 燈管區(qū)別存在多方面,具體如下:
工作原理
紅外感應(yīng) LED 燈管:利用紅外線的熱輻射原理��,通過(guò)檢測(cè)物體發(fā)射或反射的紅外線能量變化來(lái)判斷是否有物體存在或移動(dòng)。燈管內(nèi)的紅外感應(yīng)模塊通常由熱釋電元件等組成��,當(dāng)有溫度變化時(shí)��,熱釋電元件會(huì)產(chǎn)生電荷變化��,從而觸發(fā)電路控制燈管的開(kāi)關(guān)��。
雷達(dá) LED 燈管:基于微波雷達(dá)技術(shù)��,通過(guò)向外發(fā)射高頻電磁波��,并接收反射回來(lái)的信號(hào)來(lái)檢測(cè)物體的移動(dòng)��。利用多普勒效應(yīng)��,當(dāng)外界有移動(dòng)物體時(shí)��,反射波的頻率會(huì)發(fā)生變化��,這種變化被感應(yīng)模塊檢測(cè)到后��,觸發(fā)燈具改變狀態(tài)��。
性能特點(diǎn)
感應(yīng)距離:雷達(dá) LED 燈管的感應(yīng)距離通常更遠(yuǎn)��,一般可達(dá) 8-10 米��;紅外感應(yīng) LED 燈管的感應(yīng)距離相對(duì)較短��,通常在 3-8 米��。
感應(yīng)角度:雷達(dá) LED 燈管具有更寬的感應(yīng)角度��,能夠?qū)崿F(xiàn)全方位的檢測(cè)��;紅外感應(yīng) LED 燈管的感應(yīng)角度相對(duì)較窄��,可能需要調(diào)整安裝角度以確保有效覆蓋��。
抗干擾能力:雷達(dá) LED 燈管不受溫度��、濕度��、電磁場(chǎng)��、燈光等環(huán)境因素的干擾��,還能穿透一定厚度的非金屬障礙物��;紅外感應(yīng) LED 燈管對(duì)環(huán)境中的熱源干擾較為敏感��,陽(yáng)光直射、空調(diào)熱風(fēng)等都可能影響其正常感應(yīng)��。
對(duì)物體移動(dòng)速度的適應(yīng)性:雷達(dá) LED 燈管對(duì)于快速移動(dòng)和緩慢移動(dòng)的物體都能及時(shí)準(zhǔn)確地感應(yīng)到��;紅外感應(yīng) LED 燈管在檢測(cè)快速移動(dòng)的物體時(shí)��,可能會(huì)出現(xiàn)延遲或漏檢的現(xiàn)象��。

適用場(chǎng)景
雷達(dá) LED 燈管:適用于大型空間��、戶外場(chǎng)所��、人流量較大的區(qū)域��,如停車(chē)場(chǎng)��、走廊��、倉(cāng)庫(kù)等��,能夠在較大范圍內(nèi)準(zhǔn)確檢測(cè)到物體的移動(dòng)��,提供及時(shí)的照明��。
紅外感應(yīng) LED 燈管:更適合于對(duì)感應(yīng)距離和角度要求不高��、環(huán)境干擾較小的場(chǎng)所��,如小型房間��、樓道��、衛(wèi)生間等��,在這些場(chǎng)所中可以滿足基本的自動(dòng)照明需求��,且成本相對(duì)較低��。
外觀結(jié)構(gòu)
雷達(dá) LED 燈管:由于雷達(dá)感應(yīng)技術(shù)可穿透非金屬物體��,所以雷達(dá)感應(yīng)器可以內(nèi)置到燈具內(nèi)部��,外表看起來(lái)就是個(gè)常規(guī)的 LED 燈管��。
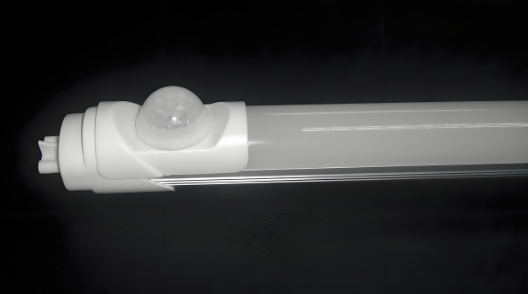
紅外感應(yīng) LED 燈管:因需要收集環(huán)境的紅外能量變化��,通常會(huì)露出人體感應(yīng)接收頭��,一般為半球狀半透明窗口��,以便更好地接收紅外線信號(hào)��。